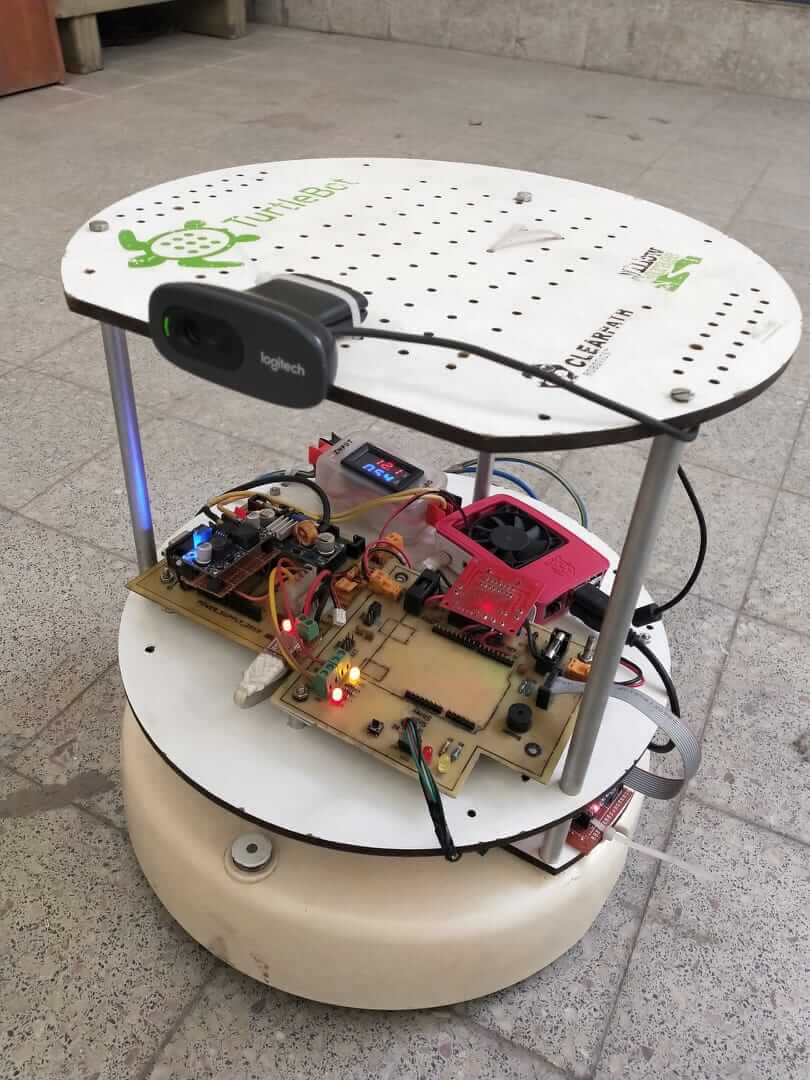
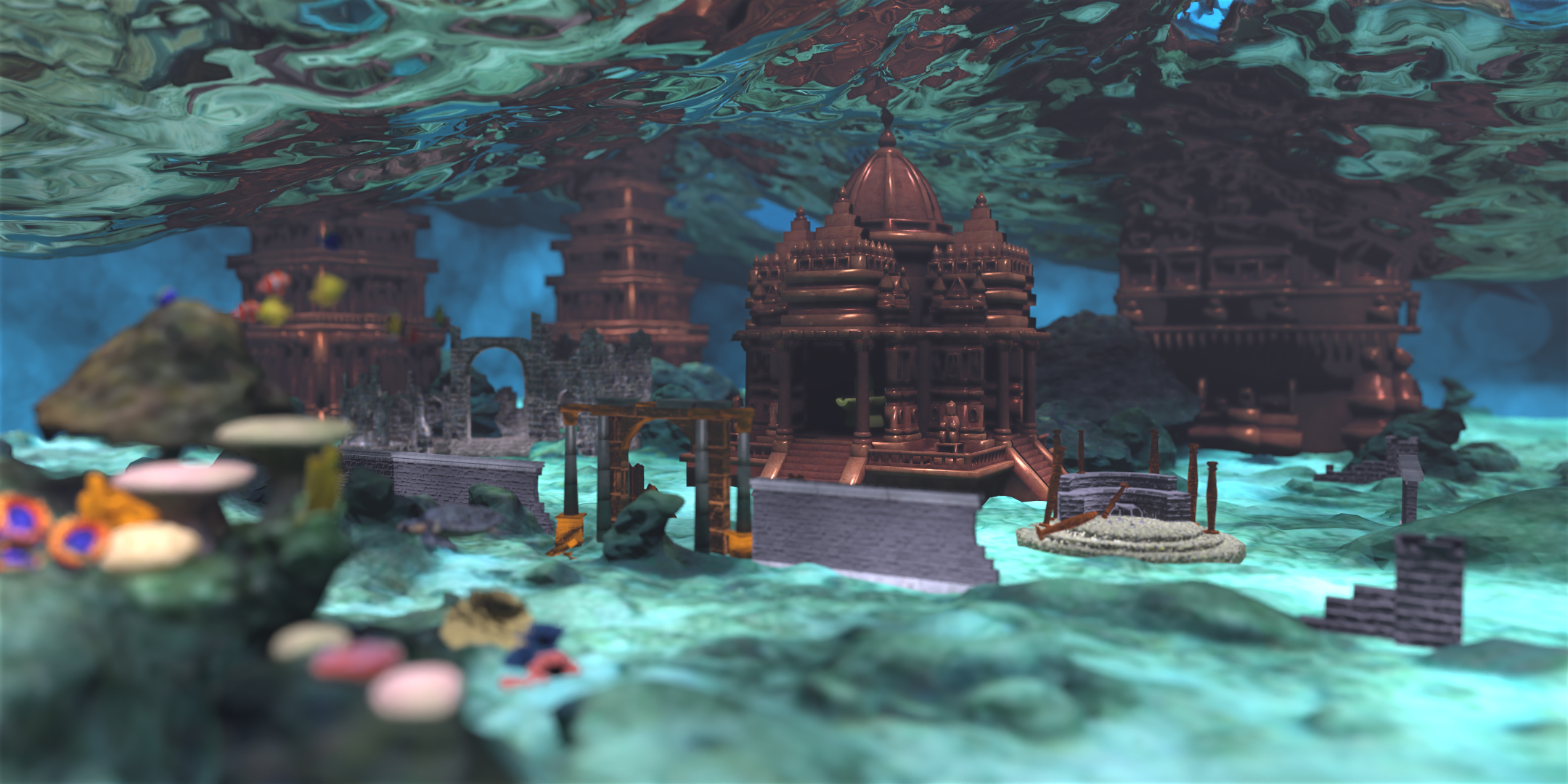
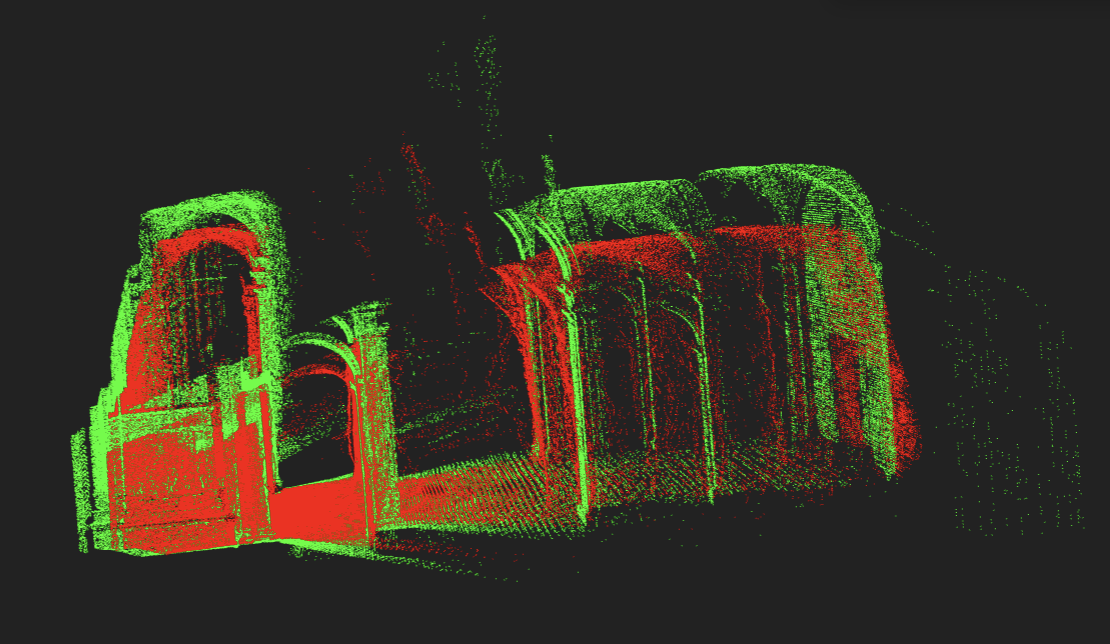
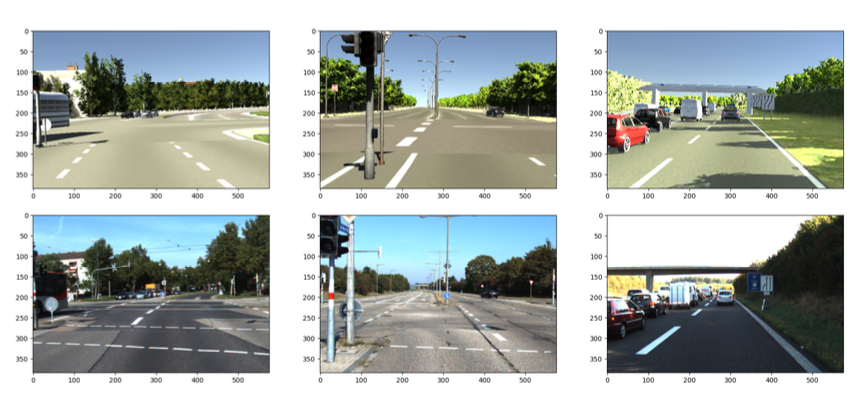
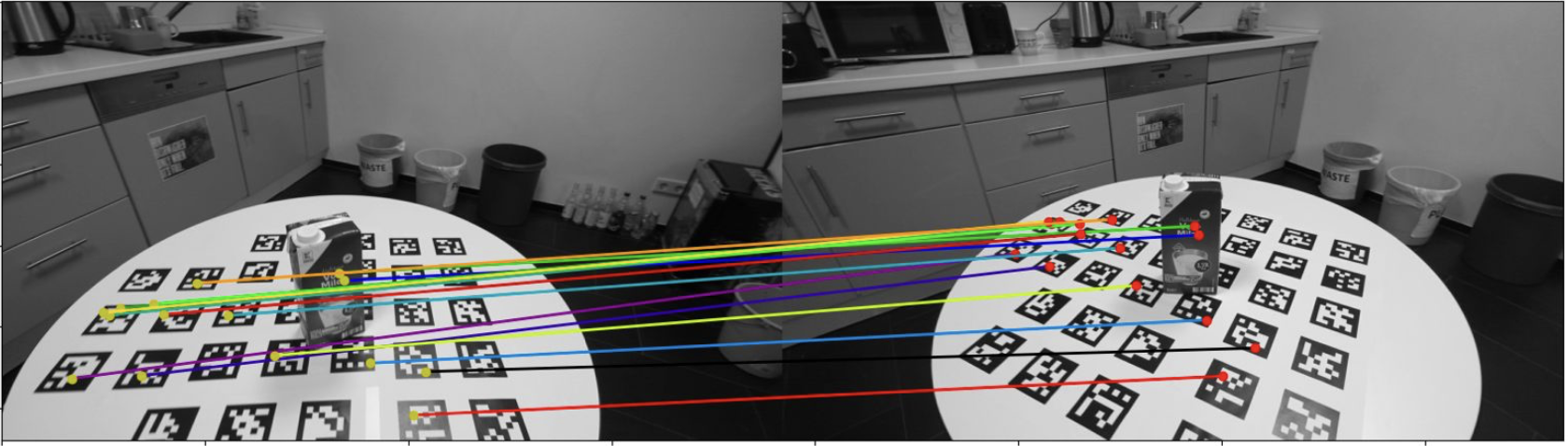
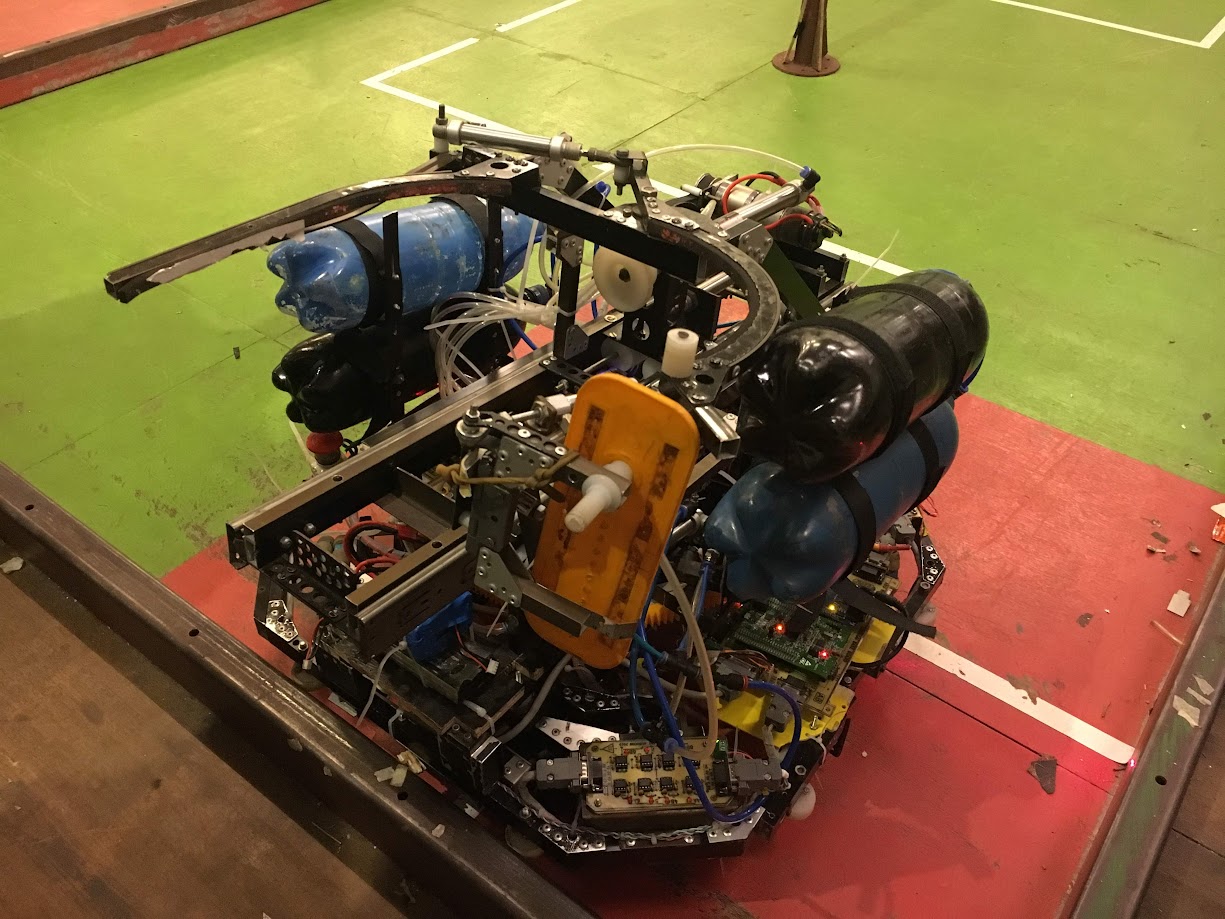
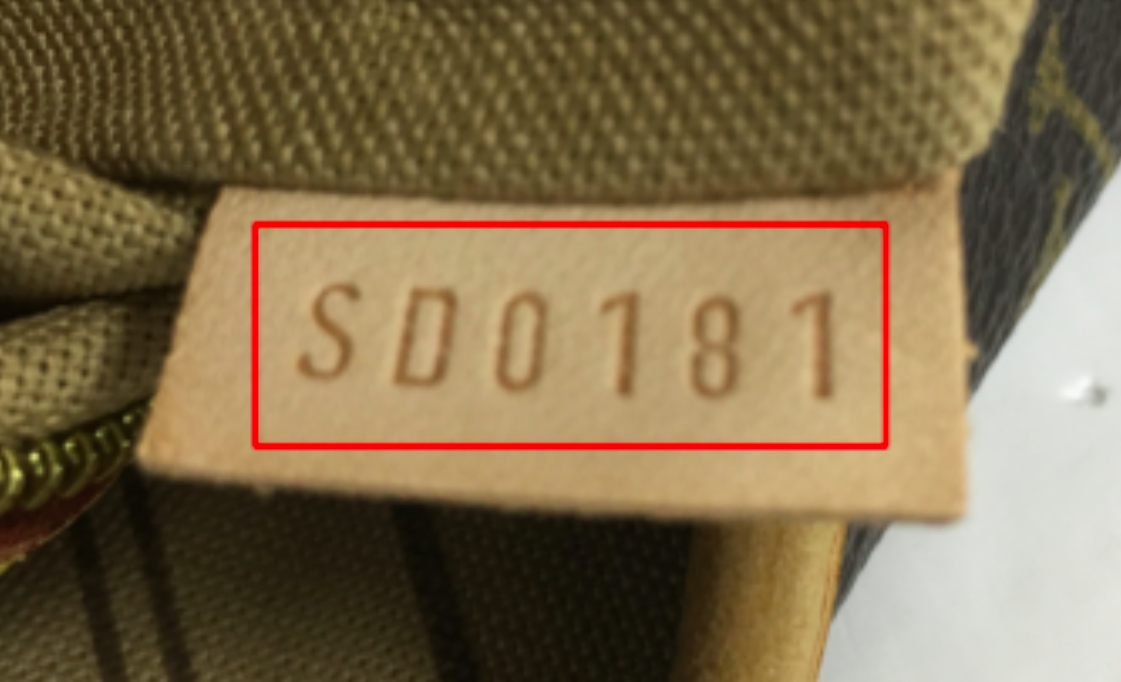
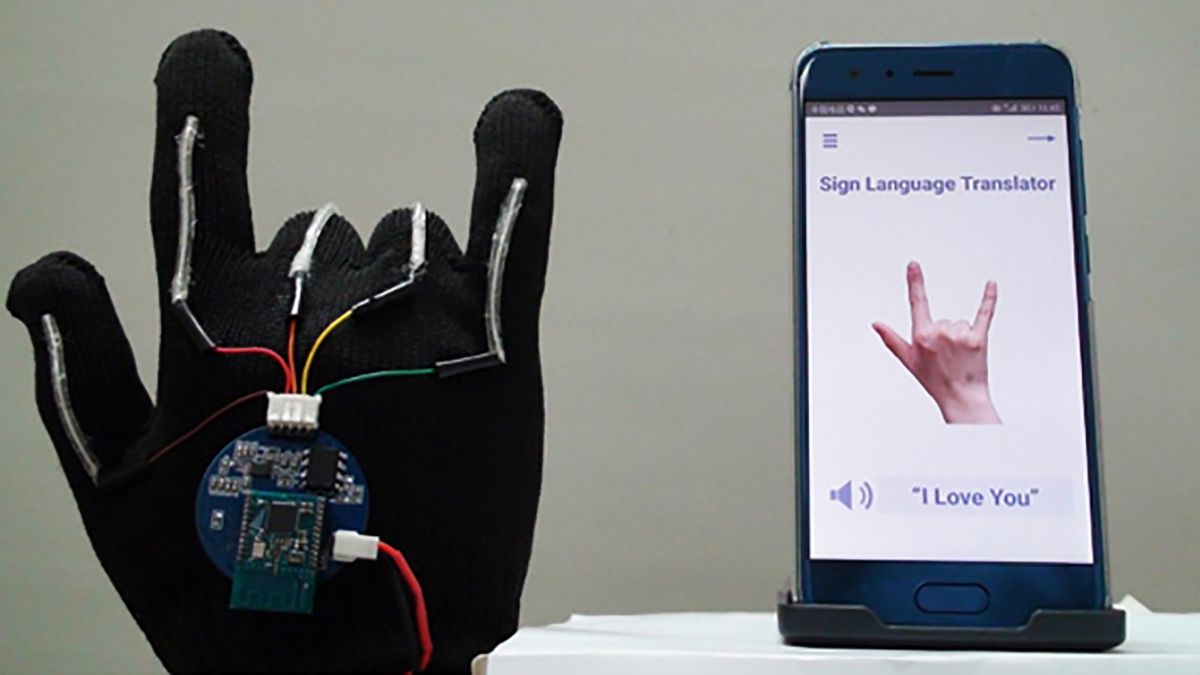
academics Visual Localisation of Robot Localisation of the mobile robot in case of changing environment by help of camera using concept of multiview geometry and computer vision. Computer Graphics Rendering Competition As a part of course work of Computer Graphics implemented a rendeing pipeline for ray tracing. 3D-Reconstruction in Challenging Sparse View Setup As a part of ETH Summer Research Fellowship 2025 at ETH Zürich I was involved in this research project Generation of Real world images from Simulated images As a part of course work of High Level Computer Vsion implemented image translation pipeline Structure from motion Framework As a part of course work of 3D Computer Vsion implemented strucutre from motion framework for redonstruction Robots for ABU Robocon 2019 Construction of autonomous robots and their control according to the theme of the ABU Robocon competition </a> Precision Livestock Farming Smart poultry system with automatic maintenance of suitable environment and behavior analysis of chicken using image and sound analysis Vehicle Traffic Management and Analysis Estimation of Traffic Congestion and controlling of traffic lights for proper management of traffic. work Counterfeit product detection Using multiple areas of interest of given product the custom designed model was trained to classify the product as real or fake Area of Interest(AOI) Region Detection Object detection model(yolov5) to detect multiple area of interest region of a product. Conversion of Slides and script to video conversion of Slides and Scripts into the Videos personal Smart Gloves Translates sign into speech by detecting gesture of hand by the gloves. Intelligent Character recognition for Mathematical Documents From a mathematical document detects the mathematical equation and converts it into latex code and rest into text. Changing Background of Livestream video Segmentation of background and overlaying new image into it or blurring the background.